A Flying Fish Robotic Model Organism: Design, Fabrication and Experimental Evaluation
Mechatronics, Robotics, Hydrodynamics, Waterproofing, Biomimetics, Experimental Evaluation
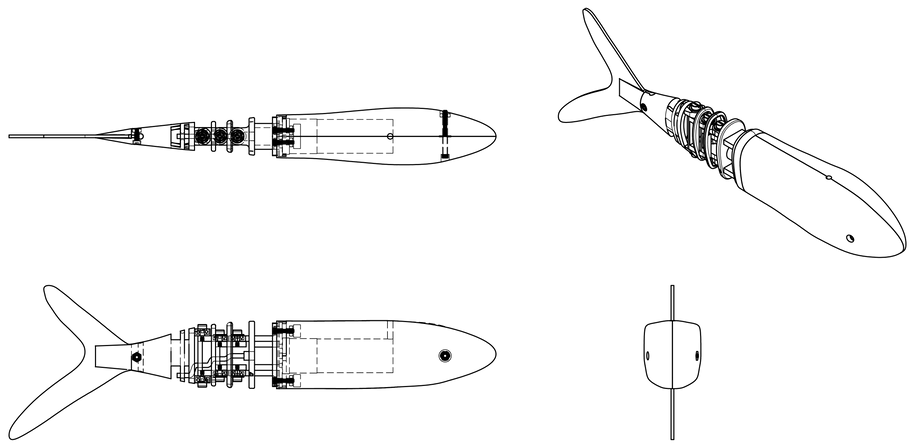
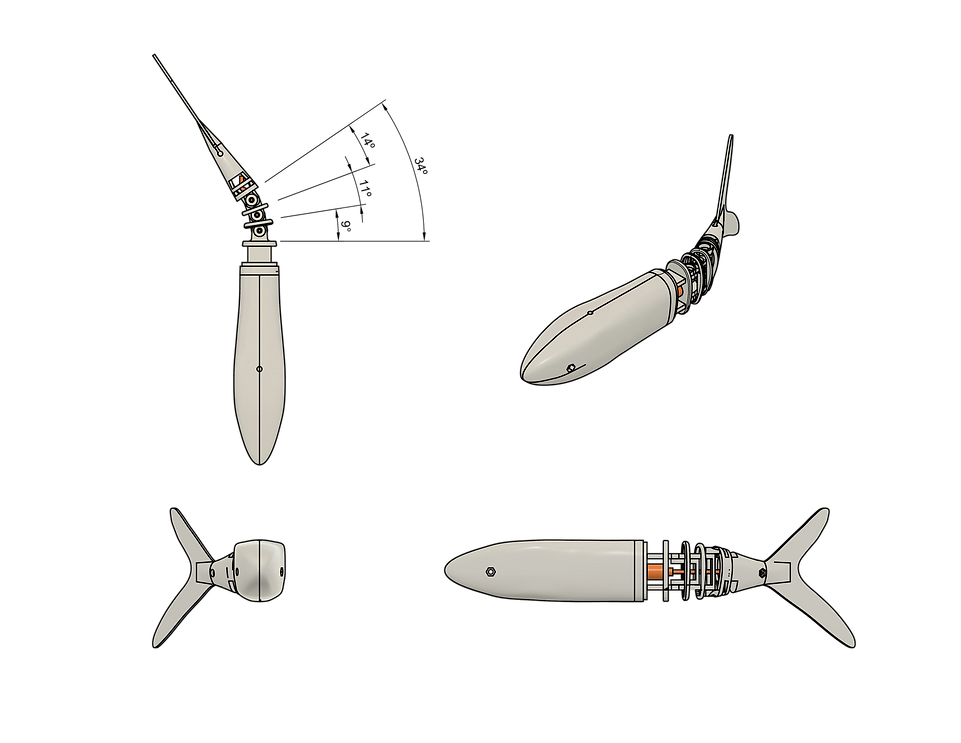
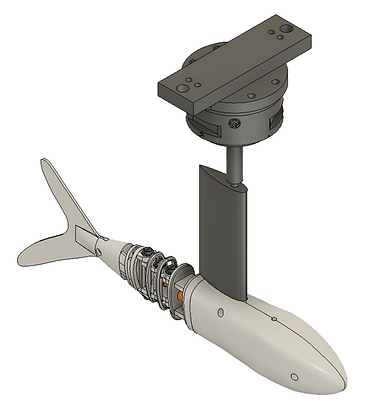
A robotic model organism (RMO) is a physical model of a living system used to test biological hypotheses about the organism’s locomotion and enables the exploration of the biological parameter space beyond what is observable in nature. Herein, we present the design, fabrication, and experimental evaluation methods of a flying fish RMO. The design of the flying fish RMO consists of a body, caudal fin, deployable pectoral fins, and pelvic fins. The pectoral fin and pelvic fin profiles are approximated from the literature on flying fish. The caudal fin mechanism is designed to approximate the carangiform swimming exhibited by flying fish. The fuselage and caudal fin are designed based on published sketches and photos to generate a biologically relevant form. The RMO design is modular to accommodate water channel and free swimming experiments. Water channel experiments are performed to characterize the hydrodynamic performance of the RMO, including the thrust generated by the caudal fin and the drag of the RMO, and the effect of asymmetrically deploying the pectoral fins on the hydrodynamic moments.